Lecture 1
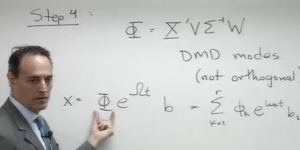
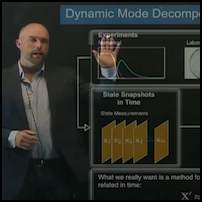
DYNAMIC MODE DECOMPOSITION: This lecture provides an introduction to the Dynamic Mode Decomposition (DMD). The focus is on approximating a nonlinear dynamical system with a linear system.
MATLAB CODE
Lecture 2

[ view ]
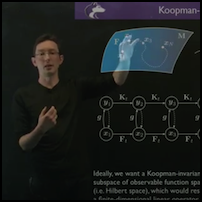
KOOPMAN THEORY: This lecture generalizes the DMD method to a function of the state-space, thus potentially providing a coordinate system that is intrinsically linear.
MATLAB CODE
Lecture 3
[ view ]
TIME DELAY EMBEDDINGS: This lecture generalizes the Koopman/DMD method to a function of the state-space created by time-delay embedding of the dynamical trajectories.
MATLAB CODE
KEY REFERENCES AND SUPPLEMENTARY VIDEOS
Koopman observable subspaces and finite linear representations of nonlinear dynamical systems for control
- S. L. Brunton, B. Brunton, J. L. Proctor and J. N. Kutz, Koopman observable subspaces and finite linear representations of nonlinear dynamical systems for control PLOS ONE (2016)
Dynamic Mode Decomposition with Control
This video highlights the concepts of Dynamic Mode Decomposition which includes actuation and control.
[View]
[View]
- J. L. Proctor, S. L. Brunton and J. N. Kutz Dynamic Mode Decomposition with Control, SIAM Journal of Applied Dynamical Systems 15 (2016) 142-161

Koopman theory for partial differential equations
This video highlights the concepts of Koopman theory and how they can be used for partial differential equations.
[View]
[View]
- J. N. Kutz, J. Proctor and S. L. Brunton, Koopman theory for partial differential equations, arxiv (2016).
Multi-Resolution Dynamic Mode Decomposition
This video highlights the recent innovation of multi-resolution analysis applied to dynamic mode decomposition.
[View]
[View]
- J. N. Kutz, X. Fu and S. L. Brunton, Multi-resolution dynamic mode decomposition SIAM Journal of Applied Dynamical Systems 15 (2016) 713-735

Generalizing Koopman Theory to Allow for Inputs and Control
This video highlights the new innovations around Koopman theory and data-driven control strategies.
[View]
[View]
- J. L. Proctor, S. L. Brunton and J. N. Kutz Generalizing Koopman theory to allow for inputs and control, SIAM Journal of Applied Dynamical Systems 17 (2018) 909